Show code cell source
import numpy as np
import matplotlib.pyplot as plt
# ── Utility functions ──────────────────────────────────────────────
def softmax(logits):
shifted = logits - logits.max(axis=1, keepdims=True)
exp_values = np.exp(shifted)
return exp_values / exp_values.sum(axis=1, keepdims=True)
def softmax_cross_entropy(logits, targets):
probabilities = softmax(logits)
clipped = np.clip(probabilities[np.arange(targets.shape[0]), targets], 1e-12, 1.0)
loss = -np.log(clipped).mean()
d_logits = probabilities.copy()
d_logits[np.arange(targets.shape[0]), targets] -= 1.0
d_logits /= targets.shape[0]
return loss, probabilities, d_logits
# ── Layer definitions ──────────────────────────────────────────────
class Conv2D:
def __init__(self, in_channels, out_channels, kernel_size, seed=42):
rng = np.random.default_rng(seed)
fan_in = in_channels * kernel_size * kernel_size
scale = np.sqrt(2.0 / fan_in)
self.in_channels = in_channels
self.out_channels = out_channels
self.kernel_size = kernel_size
self.weights = rng.normal(0.0, scale, size=(out_channels, in_channels, kernel_size, kernel_size))
self.bias = np.zeros(out_channels)
self.d_weights = np.zeros_like(self.weights)
self.d_bias = np.zeros_like(self.bias)
self.last_input = None
def forward(self, x):
self.last_input = x
batch_size, _, height, width = x.shape
out_h = height - self.kernel_size + 1
out_w = width - self.kernel_size + 1
output = np.zeros((batch_size, self.out_channels, out_h, out_w))
for row in range(out_h):
for col in range(out_w):
patch = x[:, :, row:row+self.kernel_size, col:col+self.kernel_size]
output[:, :, row, col] = np.tensordot(patch, self.weights, axes=([1,2,3],[1,2,3])) + self.bias
return output
def backward(self, d_output):
x = self.last_input
_, _, out_h, out_w = d_output.shape
self.d_weights.fill(0.0)
self.d_bias = d_output.sum(axis=(0, 2, 3))
d_input = np.zeros_like(x)
for row in range(out_h):
for col in range(out_w):
patch = x[:, :, row:row+self.kernel_size, col:col+self.kernel_size]
self.d_weights += np.tensordot(d_output[:, :, row, col], patch, axes=([0], [0]))
d_input[:, :, row:row+self.kernel_size, col:col+self.kernel_size] += np.tensordot(
d_output[:, :, row, col], self.weights, axes=([1], [0]))
return d_input
def step(self, lr):
self.weights -= lr * self.d_weights
self.bias -= lr * self.d_bias
@property
def parameter_count(self):
return int(self.weights.size + self.bias.size)
class ReLU:
def __init__(self):
self.last_input = None
def forward(self, x):
self.last_input = x
return np.maximum(0.0, x)
def backward(self, d_output):
return d_output * (self.last_input > 0.0)
class MaxPool2D:
def __init__(self, pool_size=2):
self.pool_size = pool_size
self.last_input = None
self.last_mask = None
def forward(self, x):
self.last_input = x
batch_size, channels, height, width = x.shape
out_h = height // self.pool_size
out_w = width // self.pool_size
output = np.zeros((batch_size, channels, out_h, out_w))
mask = np.zeros_like(x)
for row in range(out_h):
for col in range(out_w):
rs, cs = row * self.pool_size, col * self.pool_size
window = x[:, :, rs:rs+self.pool_size, cs:cs+self.pool_size]
output[:, :, row, col] = window.max(axis=(2, 3))
flat_idx = window.reshape(batch_size, channels, -1).argmax(axis=2)
for b in range(batch_size):
for c in range(channels):
winner = flat_idx[b, c]
mask[b, c, rs + winner // self.pool_size, cs + winner % self.pool_size] = 1.0
self.last_mask = mask
return output
def backward(self, d_output):
d_input = np.zeros_like(self.last_input)
out_h, out_w = d_output.shape[2], d_output.shape[3]
for row in range(out_h):
for col in range(out_w):
rs, cs = row * self.pool_size, col * self.pool_size
mask_w = self.last_mask[:, :, rs:rs+self.pool_size, cs:cs+self.pool_size]
d_input[:, :, rs:rs+self.pool_size, cs:cs+self.pool_size] += (
mask_w * d_output[:, :, row, col][:, :, None, None])
return d_input
class Flatten:
def __init__(self):
self.last_shape = None
def forward(self, x):
self.last_shape = x.shape
return x.reshape(x.shape[0], -1)
def backward(self, d_output):
return d_output.reshape(self.last_shape)
class Dense:
def __init__(self, in_features, out_features, seed=42):
rng = np.random.default_rng(seed)
scale = np.sqrt(2.0 / in_features)
self.weights = rng.normal(0.0, scale, size=(in_features, out_features))
self.bias = np.zeros(out_features)
self.d_weights = np.zeros_like(self.weights)
self.d_bias = np.zeros_like(self.bias)
self.last_input = None
def forward(self, x):
self.last_input = x
return x @ self.weights + self.bias
def backward(self, d_output):
self.d_weights = self.last_input.T @ d_output
self.d_bias = d_output.sum(axis=0)
return d_output @ self.weights.T
def step(self, lr):
self.weights -= lr * self.d_weights
self.bias -= lr * self.d_bias
@property
def parameter_count(self):
return int(self.weights.size + self.bias.size)
# ── TinyCNN ─────────────────────────────────────────────────────────
class TinyCNN:
def __init__(self, seed=3, input_size=8, num_classes=3, conv_filters=3):
rng_seed = seed
self.conv = Conv2D(1, conv_filters, 3, seed=rng_seed)
self.relu = ReLU()
self.pool = MaxPool2D(2)
self.flatten = Flatten()
conv_out = input_size - 3 + 1
pooled = conv_out // 2
self.dense = Dense(conv_filters * pooled * pooled, num_classes, seed=rng_seed + 1)
self.num_classes = num_classes
self.conv_filters = conv_filters
def forward(self, x):
return self.dense.forward(self.flatten.forward(self.pool.forward(self.relu.forward(self.conv.forward(x)))))
def forward_with_trace(self, x):
"""Forward pass returning all intermediate activations."""
conv_out = self.conv.forward(x)
relu_out = self.relu.forward(conv_out)
pool_out = self.pool.forward(relu_out)
flat_out = self.flatten.forward(pool_out)
logits = self.dense.forward(flat_out)
probs = softmax(logits)
return {
'input': x,
'conv': conv_out,
'relu': relu_out,
'pool': pool_out,
'logits': logits,
'probs': probs,
}
def loss_and_grad(self, x, y):
logits = self.forward(x)
loss, probs, d_logits = softmax_cross_entropy(logits, y)
d = self.dense.backward(d_logits)
d = self.flatten.backward(d)
d = self.pool.backward(d)
d = self.relu.backward(d)
self.conv.backward(d)
return loss, probs
def step(self, lr):
self.conv.step(lr)
self.dense.step(lr)
def evaluate(self, x, y):
logits = self.forward(x)
loss, _, _ = softmax_cross_entropy(logits, y)
accuracy = float((logits.argmax(axis=1) == y).mean())
return loss, accuracy
def fit(self, x_train, y_train, x_val, y_val, epochs=80, lr=0.12, batch_size=18, seed=11, snapshot_epochs=(0,1,5,15,40,80)):
rng = np.random.default_rng(seed)
history = []
snapshots = []
def record(ep):
tl, ta = self.evaluate(x_train, y_train)
_, va = self.evaluate(x_val, y_val)
history.append({"epoch": ep, "train_loss": tl, "train_acc": ta, "val_acc": va})
if ep in snapshot_epochs:
snapshots.append({"epoch": ep, "kernels": self.conv.weights.copy()})
record(0)
for ep in range(1, epochs + 1):
order = rng.permutation(x_train.shape[0])
sx, sy = x_train[order], y_train[order]
for start in range(0, x_train.shape[0], batch_size):
self.loss_and_grad(sx[start:start+batch_size], sy[start:start+batch_size])
self.step(lr)
record(ep)
return history, snapshots
@property
def total_parameters(self):
return self.conv.parameter_count + self.dense.parameter_count
# ── TinyMLP ─────────────────────────────────────────────────────────
class TinyMLP:
def __init__(self, seed=5, input_size=8, hidden_size=18, num_classes=3):
rng = np.random.default_rng(seed)
flat_size = input_size * input_size
self.flatten = Flatten()
self.hidden = Dense(flat_size, hidden_size, seed=seed)
self.relu = ReLU()
self.output = Dense(hidden_size, num_classes, seed=seed + 1)
self.num_classes = num_classes
def forward(self, x):
return self.output.forward(self.relu.forward(self.hidden.forward(self.flatten.forward(x))))
def loss_and_grad(self, x, y):
logits = self.forward(x)
loss, probs, d_logits = softmax_cross_entropy(logits, y)
d = self.output.backward(d_logits)
d = self.relu.backward(d)
d = self.hidden.backward(d)
self.flatten.backward(d)
return loss, probs
def step(self, lr):
self.hidden.step(lr)
self.output.step(lr)
def evaluate(self, x, y):
logits = self.forward(x)
loss, _, _ = softmax_cross_entropy(logits, y)
accuracy = float((logits.argmax(axis=1) == y).mean())
return loss, accuracy
def fit(self, x_train, y_train, x_val, y_val, epochs=80, lr=0.12, batch_size=18, seed=13):
rng = np.random.default_rng(seed)
history = []
def record(ep):
tl, ta = self.evaluate(x_train, y_train)
_, va = self.evaluate(x_val, y_val)
history.append({"epoch": ep, "train_loss": tl, "train_acc": ta, "val_acc": va})
record(0)
for ep in range(1, epochs + 1):
order = rng.permutation(x_train.shape[0])
sx, sy = x_train[order], y_train[order]
for start in range(0, x_train.shape[0], batch_size):
self.loss_and_grad(sx[start:start+batch_size], sy[start:start+batch_size])
self.step(lr)
record(ep)
return history
@property
def total_parameters(self):
return self.hidden.parameter_count + self.output.parameter_count
# ── Dataset ──────────────────────────────────────────────────────────
CLASS_NAMES = ("vertical", "horizontal", "diagonal")
DOT_CLASS_NAMES = ("vertical", "horizontal", "diagonal", "dot")
def _pattern_for_class(name, size):
pattern = np.zeros((size, size))
c = size // 2
if name == "vertical": pattern[:, c-1:c+1] = 1.0
elif name == "horizontal": pattern[c-1:c+1, :] = 1.0
elif name == "diagonal":
np.fill_diagonal(pattern, 1.0)
pattern += 0.35 * np.eye(size, k=1) + 0.35 * np.eye(size, k=-1)
elif name == "dot": pattern[c-1:c+1, c-1:c+1] = 1.0
return np.clip(pattern, 0.0, 1.0)
def make_dataset(train_per_class=60, val_per_class=30, size=8, seed=7, class_names=CLASS_NAMES):
rng = np.random.default_rng(seed)
total = train_per_class + val_per_class
patterns = [_pattern_for_class(n, size) for n in class_names]
all_x, all_y = [], []
for label, pat in enumerate(patterns):
for _ in range(total):
img = pat.copy()
sy, sx = rng.integers(-1, 2, size=2)
shifted = np.zeros_like(img)
src_ys = max(0, -sy); src_ye = size - max(0, sy)
src_xs = max(0, -sx); src_xe = size - max(0, sx)
dst_ys = max(0, sy); dst_xs = max(0, sx)
shifted[dst_ys:dst_ys+(src_ye-src_ys), dst_xs:dst_xs+(src_xe-src_xs)] = img[src_ys:src_ye, src_xs:src_xe]
canvas = shifted * rng.uniform(0.85, 1.15)
canvas += rng.normal(0, 0.12, (size, size))
all_x.append(np.clip(canvas, 0, 1))
all_y.append(label)
x = np.array(all_x)[:, None, :, :]
y = np.array(all_y, dtype=np.int64)
rng2 = np.random.default_rng(seed + 99)
xt, yt, xv, yv = [], [], [], []
for label in range(len(class_names)):
idx = np.where(y == label)[0]
order = rng2.permutation(len(idx))
idx = idx[order]
xt.append(x[idx[:train_per_class]]); yt.append(y[idx[:train_per_class]])
xv.append(x[idx[train_per_class:]]); yv.append(y[idx[train_per_class:]])
x_train = np.concatenate(xt); y_train = np.concatenate(yt)
x_val = np.concatenate(xv); y_val = np.concatenate(yv)
order_t = rng2.permutation(len(x_train)); order_v = rng2.permutation(len(x_val))
return x_train[order_t], y_train[order_t], x_val[order_v], y_val[order_v]
# ── Plot styling ─────────────────────────────────────────────────────
CREAM = '#fdf6ec'
CNN_BLUE = '#22577a'
MLP_RED = '#bc4749'
GREEN_LIGHT = '#55a630'
GREEN_DARK = '#2b9348'
def style_ax(ax, title=None, xlabel=None, ylabel=None):
ax.set_facecolor(CREAM)
if title: ax.set_title(title, fontsize=13, fontweight='bold', pad=8)
if xlabel: ax.set_xlabel(xlabel, fontsize=11)
if ylabel: ax.set_ylabel(ylabel, fontsize=11)
ax.spines['top'].set_visible(False)
ax.spines['right'].set_visible(False)
ax.grid(True, alpha=0.3, linestyle='--')
print('Infrastructure loaded: Conv2D, ReLU, MaxPool2D, Flatten, Dense, TinyCNN, TinyMLP, make_dataset')
Infrastructure loaded: Conv2D, ReLU, MaxPool2D, Flatten, Dense, TinyCNN, TinyMLP, make_dataset
Chapter 25: CNN Experiments and Analysis#
In the previous chapter we built a convolutional neural network from scratch and watched it learn to classify simple 8\(\times\)8 patterns. Now we turn to the experimental side: How does the CNN compare to a plain fully-connected network? How sensitive is the MLP baseline to its hidden-layer width? What happens when we add a fourth pattern class? And what, exactly, do the learned convolutional filters look like?
This chapter is heavy on visualization and analysis. Every figure is generated from our pure-NumPy implementations; no external deep-learning library is used.
25.1 CNN vs MLP Baseline#
Our first experiment is the most natural one: train both architectures on the same 3-class data and compare them.
The TinyCNN uses 3 convolutional filters of size \(3\times 3\) followed by
ReLU, \(2\times 2\) max-pooling, flattening, and a dense output layer. The
TinyMLP flattens the image directly and passes it through a hidden layer of
18 units with ReLU, then a dense output layer.
We train both for 80 epochs with learning rate \(\eta = 0.12\) and batch size 18.
Show code cell source
# Train CNN and MLP on the 3-class dataset
x_train, y_train, x_val, y_val = make_dataset()
cnn = TinyCNN(seed=3)
cnn_history, cnn_snapshots = cnn.fit(x_train, y_train, x_val, y_val)
mlp = TinyMLP(seed=5)
mlp_history = mlp.fit(x_train, y_train, x_val, y_val)
# Two-panel figure: training curves and parameter counts
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(11, 4.2))
fig.patch.set_facecolor(CREAM)
# Left: validation accuracy curves
cnn_epochs = [h['epoch'] for h in cnn_history]
cnn_val = [h['val_acc'] for h in cnn_history]
mlp_epochs = [h['epoch'] for h in mlp_history]
mlp_val = [h['val_acc'] for h in mlp_history]
ax1.plot(cnn_epochs, cnn_val, color=CNN_BLUE, linewidth=2.2, label=f'TinyCNN ({cnn.total_parameters} params)')
ax1.plot(mlp_epochs, mlp_val, color=MLP_RED, linewidth=2.2, linestyle='--', label=f'TinyMLP ({mlp.total_parameters} params)')
ax1.axhline(1.0, color='grey', linewidth=0.8, linestyle=':')
ax1.set_ylim(0.0, 1.08)
style_ax(ax1, title='Validation Accuracy', xlabel='Epoch', ylabel='Accuracy')
ax1.legend(fontsize=10, loc='lower right', framealpha=0.9)
# Right: parameter count bar chart
models = ['TinyCNN', 'TinyMLP']
params = [cnn.total_parameters, mlp.total_parameters]
colors = [CNN_BLUE, MLP_RED]
bars = ax2.bar(models, params, color=colors, width=0.5, edgecolor='white', linewidth=1.5)
for bar, p in zip(bars, params):
ax2.text(bar.get_x() + bar.get_width()/2, bar.get_height() + 20,
f'{p:,}', ha='center', va='bottom', fontsize=12, fontweight='bold')
style_ax(ax2, title='Parameter Count', ylabel='Number of Parameters')
ax2.set_ylim(0, max(params) * 1.25)
fig.suptitle('CNN vs MLP on 3-Class Pattern Recognition', fontsize=14, fontweight='bold', y=1.02)
plt.tight_layout()
plt.show()
# Print final results
cnn_final = cnn_history[-1]
mlp_final = mlp_history[-1]
print(f'CNN final accuracy: train={cnn_final["train_acc"]:.3f}, val={cnn_final["val_acc"]:.3f} ({cnn.total_parameters} parameters)')
print(f'MLP final accuracy: train={mlp_final["train_acc"]:.3f}, val={mlp_final["val_acc"]:.3f} ({mlp.total_parameters} parameters)')
print(f'Parameter ratio: MLP / CNN = {mlp.total_parameters / cnn.total_parameters:.1f}x')
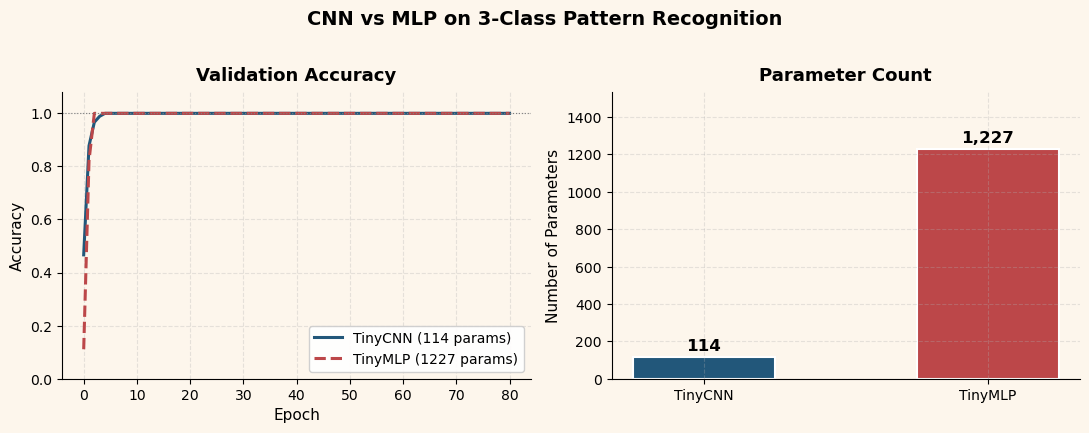
CNN final accuracy: train=1.000, val=1.000 (114 parameters)
MLP final accuracy: train=1.000, val=1.000 (1227 parameters)
Parameter ratio: MLP / CNN = 10.8x
Key Observation
On this toy task, both architectures achieve excellent accuracy. The CNN advantage is not in final accuracy but in parameter efficiency and interpretability: the CNN uses roughly 10\(\times\) fewer parameters, and its learned filters have a clear visual meaning (as we will see in Section 25.5).
The MLP must learn separate weights for every pixel position, while the CNN re-uses the same small \(3\times 3\) kernel across the entire image. This weight sharing is the source of the parameter savings.
25.3 Adding a Fourth Class#
Our original dataset has three pattern classes: vertical, horizontal, and diagonal bars. What happens when we add a fourth class – a centered dot pattern?
For the CNN, we keep the same 3 convolutional filters and simply grow the output layer from 3 to 4 units. For the MLP, we keep hidden_size=18 and also grow the output layer.
The central question: Does the CNN need more filters?
Show code cell source
# Four-class dataset
x4_train, y4_train, x4_val, y4_val = make_dataset(class_names=DOT_CLASS_NAMES)
# Train CNN (3 filters, 4 classes)
cnn4 = TinyCNN(seed=3, num_classes=4, conv_filters=3)
cnn4_history, _ = cnn4.fit(x4_train, y4_train, x4_val, y4_val)
# Train MLP (hidden=18, 4 classes)
mlp4 = TinyMLP(seed=5, hidden_size=18, num_classes=4)
mlp4_history = mlp4.fit(x4_train, y4_train, x4_val, y4_val)
# Two-panel comparison: 3-class vs 4-class
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(11, 4.2))
fig.patch.set_facecolor(CREAM)
# Left: 3-class results
ax1.plot(cnn_epochs, cnn_val, color=CNN_BLUE, linewidth=2.2, label='CNN (3 filters)')
ax1.plot(mlp_epochs, mlp_val, color=MLP_RED, linewidth=2.2, linestyle='--', label='MLP (h=18)')
ax1.axhline(1.0, color='grey', linewidth=0.8, linestyle=':')
ax1.set_ylim(0.0, 1.08)
style_ax(ax1, title='3-Class Task', xlabel='Epoch', ylabel='Validation Accuracy')
ax1.legend(fontsize=9, loc='lower right', framealpha=0.9)
# Right: 4-class results
cnn4_epochs = [h['epoch'] for h in cnn4_history]
cnn4_val = [h['val_acc'] for h in cnn4_history]
mlp4_epochs = [h['epoch'] for h in mlp4_history]
mlp4_val = [h['val_acc'] for h in mlp4_history]
ax2.plot(cnn4_epochs, cnn4_val, color=CNN_BLUE, linewidth=2.2, label=f'CNN (3 filters, {cnn4.total_parameters} params)')
ax2.plot(mlp4_epochs, mlp4_val, color=MLP_RED, linewidth=2.2, linestyle='--', label=f'MLP (h=18, {mlp4.total_parameters} params)')
ax2.axhline(1.0, color='grey', linewidth=0.8, linestyle=':')
ax2.set_ylim(0.0, 1.08)
style_ax(ax2, title='4-Class Task (+ dot)', xlabel='Epoch', ylabel='Validation Accuracy')
ax2.legend(fontsize=9, loc='lower right', framealpha=0.9)
fig.suptitle('Scaling from 3 to 4 Classes', fontsize=14, fontweight='bold', y=1.02)
plt.tight_layout()
plt.show()
print(f'4-class CNN: val_acc = {cnn4_history[-1]["val_acc"]:.3f} ({cnn4.total_parameters} params, 3 filters)')
print(f'4-class MLP: val_acc = {mlp4_history[-1]["val_acc"]:.3f} ({mlp4.total_parameters} params, h=18)')
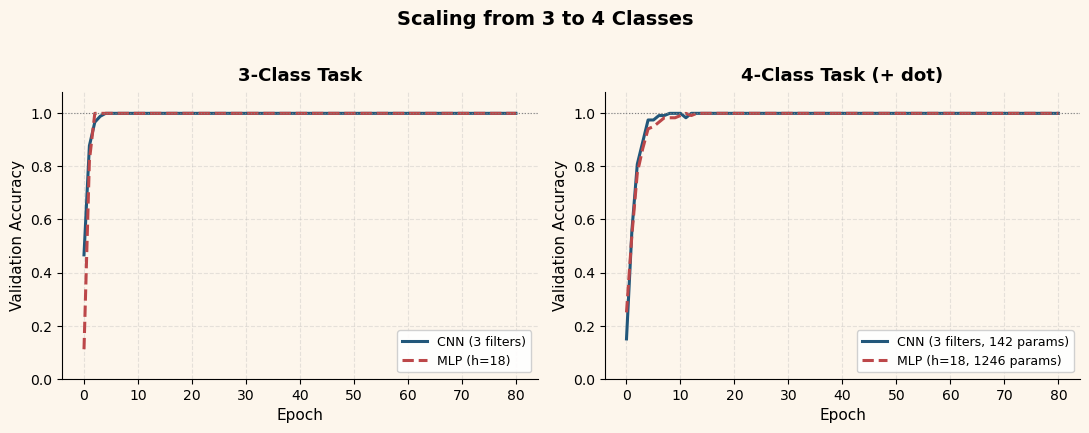
4-class CNN: val_acc = 1.000 (142 params, 3 filters)
4-class MLP: val_acc = 1.000 (1246 params, h=18)
The answer is no – the CNN does not need more convolutional filters to handle the fourth class. The convolutional layers act as a general-purpose feature extractor: they detect oriented edges and local intensity patterns regardless of how many classes the output head must distinguish. Adding a fourth class only requires one more output neuron in the dense layer, adding just \(3 \times 3 + 1 = 10\) parameters (one weight per pooled feature map location, plus one bias).
This separation between the feature extractor and the classifier head is one of the most important architectural ideas in deep learning. It is the basis for transfer learning: pre-train the convolutional layers on a large dataset, then replace only the output head for a new task.
25.4 Inference Trace#
To build intuition for what happens inside the CNN, we take a single input image and trace it through every stage of the pipeline:
We use the CNN trained on the 3-class data (from Section 25.1) and pass a single vertical-bar sample through it.
Show code cell source
# Pick a vertical-bar sample from validation set
vert_idx = np.where(y_val == 0)[0][0]
sample = x_val[vert_idx:vert_idx+1] # shape (1, 1, 8, 8)
# Trace through the trained CNN
trace = cnn.forward_with_trace(sample)
n_filters = cnn.conv_filters
fig, axes = plt.subplots(5, n_filters, figsize=(9, 12),
gridspec_kw={'height_ratios': [1.2, 1.0, 1.0, 0.8, 1.0]})
fig.patch.set_facecolor(CREAM)
# Row 0: Input image (span all filter columns)
for j in range(n_filters):
axes[0, j].set_visible(False)
ax_input = fig.add_axes([0.35, 0.82, 0.3, 0.14]) # manual positioning
ax_input.imshow(sample[0, 0], cmap='gray', vmin=0, vmax=1, aspect='equal')
ax_input.set_title('Input (8x8)', fontsize=11, fontweight='bold')
ax_input.set_xticks([]); ax_input.set_yticks([])
ax_input.patch.set_facecolor(CREAM)
# Row 1: Conv output (3 feature maps, 6x6)
for j in range(n_filters):
im = axes[1, j].imshow(trace['conv'][0, j], cmap='RdBu_r', aspect='equal')
axes[1, j].set_title(f'Conv filter {j}', fontsize=9)
axes[1, j].set_xticks([]); axes[1, j].set_yticks([])
axes[1, j].patch.set_facecolor(CREAM)
fig.text(0.02, 0.68, 'Conv\nOutput', fontsize=10, fontweight='bold', va='center', ha='center')
# Row 2: ReLU output
for j in range(n_filters):
axes[2, j].imshow(trace['relu'][0, j], cmap='Oranges', aspect='equal', vmin=0)
axes[2, j].set_title(f'ReLU {j}', fontsize=9)
axes[2, j].set_xticks([]); axes[2, j].set_yticks([])
axes[2, j].patch.set_facecolor(CREAM)
fig.text(0.02, 0.52, 'ReLU\nOutput', fontsize=10, fontweight='bold', va='center', ha='center')
# Row 3: Pooled output (3x3)
for j in range(n_filters):
axes[3, j].imshow(trace['pool'][0, j], cmap='Oranges', aspect='equal', vmin=0)
axes[3, j].set_title(f'Pool {j}', fontsize=9)
axes[3, j].set_xticks([]); axes[3, j].set_yticks([])
axes[3, j].patch.set_facecolor(CREAM)
fig.text(0.02, 0.36, 'MaxPool\nOutput', fontsize=10, fontweight='bold', va='center', ha='center')
# Row 4: Softmax bar chart (span all columns)
for j in range(n_filters):
axes[4, j].set_visible(False)
ax_bar = fig.add_axes([0.2, 0.05, 0.6, 0.15])
probs = trace['probs'][0]
bar_colors = [CNN_BLUE if i == 0 else '#aaaaaa' for i in range(len(probs))]
bars = ax_bar.barh(CLASS_NAMES[:len(probs)], probs, color=bar_colors, edgecolor='white', height=0.5)
for bar, p in zip(bars, probs):
ax_bar.text(bar.get_width() + 0.02, bar.get_y() + bar.get_height()/2,
f'{p:.3f}', va='center', fontsize=10, fontweight='bold')
ax_bar.set_xlim(0, 1.15)
ax_bar.set_title('Softmax Probabilities', fontsize=11, fontweight='bold')
ax_bar.set_facecolor(CREAM)
ax_bar.spines['top'].set_visible(False)
ax_bar.spines['right'].set_visible(False)
fig.suptitle('Inference Trace: Vertical Bar through TinyCNN', fontsize=14,
fontweight='bold', y=0.99)
plt.show()

Reading the trace from top to bottom:
Input: the 8\(\times\)8 grayscale image shows a vertical bar (two bright columns in the center).
Conv output: each of the 3 learned filters responds differently to the input. Some filters produce strong positive responses where the bar is, others are more muted.
ReLU output: negative activations are zeroed out. Only the regions where a filter truly “fires” remain.
MaxPool output: the 6\(\times\)6 feature maps are reduced to 3\(\times\)3 by taking the maximum in each 2\(\times\)2 window. This provides a small degree of translation invariance.
Softmax output: the dense layer combines the 27 pooled features into class logits, and softmax converts them to probabilities. The network correctly assigns the highest probability to “vertical”.
25.5 What the Filters Learn#
Perhaps the most compelling aspect of convolutional networks is that the learned filters are interpretable. Each \(3\times 3\) kernel is a tiny template that the network slides across the image, computing a local similarity score at each position.
Let us visualize the three learned kernels from the trained CNN and see what patterns they detect.
Show code cell source
# Visualize learned kernels
kernels = cnn.conv.weights # shape (3, 1, 3, 3)
fig, axes = plt.subplots(1, 3, figsize=(9, 3.5))
fig.patch.set_facecolor(CREAM)
vmax = np.abs(kernels).max()
for i in range(3):
k = kernels[i, 0] # shape (3, 3)
im = axes[i].imshow(k, cmap='RdBu_r', vmin=-vmax, vmax=vmax, aspect='equal')
axes[i].set_title(f'Filter {i}', fontsize=12, fontweight='bold')
axes[i].set_xticks(range(3)); axes[i].set_yticks(range(3))
axes[i].patch.set_facecolor(CREAM)
# Annotate each weight value
for r in range(3):
for c in range(3):
val = k[r, c]
color = 'white' if abs(val) > vmax * 0.6 else 'black'
axes[i].text(c, r, f'{val:.2f}', ha='center', va='center',
fontsize=9, fontweight='bold', color=color)
fig.colorbar(im, ax=axes, fraction=0.02, pad=0.04, label='Weight value')
fig.suptitle('Learned Convolutional Filters (3x3)', fontsize=14, fontweight='bold')
fig.subplots_adjust(top=0.85, bottom=0.05, wspace=0.3)
plt.show()
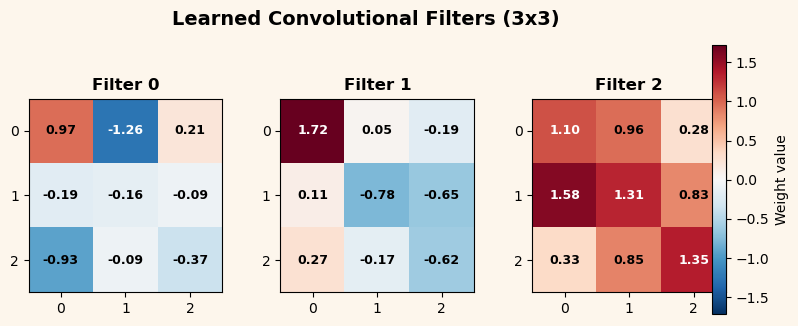
The trained filters typically show clear oriented-edge structure:
One filter develops a vertical gradient (strong positive weights in a column, negative or near-zero elsewhere) – it responds to vertical edges.
Another develops a horizontal gradient – it responds to horizontal edges.
The third often captures diagonal or more complex patterns.
These are exactly the features needed to distinguish our three pattern classes. The network has discovered, through gradient descent alone, that oriented edge detection is the right strategy.
Connection to Neuroscience
In 1959, David Hubel and Torsten Wiesel discovered that neurons in the cat’s primary visual cortex respond selectively to oriented edges at specific positions in the visual field. They called these simple cells. The filters learned by our CNN bear a striking resemblance to simple-cell receptive fields: small, spatially localized, and orientation-selective. This parallel between biological vision and artificial convolutional networks is not accidental – Kunihiko Fukushima explicitly cited Hubel and Wiesel’s work when he designed the Neocognitron (1980), the direct ancestor of modern CNNs.
25.6 Scaling Up: From 8x8 to Real Images#
Our TinyCNN operates on 8\(\times\)8 grayscale images with 3 filters and a
single convolutional layer. Real-world convolutional networks follow the same
architectural pattern – Conv \(\to\) ReLU \(\to\) Pool \(\to\) Dense – but at
vastly larger scale. Let us trace the historical progression:
Network |
Year |
Input Size |
Layers |
Parameters |
Key Innovation |
|---|---|---|---|---|---|
LeNet-5 (LeCun) |
1998 |
32\(\times\)32 |
7 |
60K |
Proven on MNIST digits |
AlexNet (Krizhevsky) |
2012 |
227\(\times\)227 |
8 |
60M |
GPU training, dropout, ReLU |
VGG-16 (Simonyan) |
2014 |
224\(\times\)224 |
16 |
138M |
Uniform 3\(\times\)3 filters throughout |
ResNet-50 (He) |
2015 |
224\(\times\)224 |
50 |
25M |
Skip connections, batch normalization |
Several patterns emerge:
Depth increases. LeNet-5 has 2 convolutional layers; ResNet-50 has 49. Deeper networks can learn hierarchical features: early layers detect edges, middle layers detect textures and parts, and deep layers detect whole objects.
Filter counts grow with depth. A typical pattern is 64 filters in the first layer, 128 in the second, 256 in the third, and so on. As spatial resolution decreases (through pooling), the number of feature channels increases.
The core operation is unchanged. Every network in the table above uses the
same cross-correlation operation we implemented in Conv2D.forward. The
mathematical foundations from our toy example carry over directly.
From MNIST to ImageNet
LeNet-5 was designed for the MNIST handwritten digit dataset (10 classes, 60,000 training images of 28\(\times\)28 pixels). AlexNet was the first CNN to win the ImageNet Large Scale Visual Recognition Challenge (1,000 classes, 1.2 million training images of roughly 256\(\times\)256 pixels). The jump from MNIST to ImageNet required not just bigger networks, but also GPU computing, data augmentation, and regularization techniques like dropout – topics that go beyond our classical foundations but build directly on the principles we have studied.
Exercises#
Exercise 25.1. Add a fifth class to the dataset (for example, a “cross” pattern that combines vertical and horizontal bars). Train the CNN with 3 filters. Does it still achieve high accuracy? At what point (how many classes) do 3 filters become insufficient?
Exercise 25.2. Modify Conv2D to support a \(2\times 2\) kernel
instead of \(3\times 3\). Train on the 3-class data and compare the
learned filters. Are \(2\times 2\) kernels expressive enough to
distinguish the patterns? What about \(5\times 5\)? (Note: a \(5\times 5\)
kernel on an \(8\times 8\) input produces only a \(4\times 4\) feature map,
and after \(2\times 2\) pooling you get \(2\times 2\). This still works but
leaves very little spatial information.)
Exercise 25.3. Implement strided convolution by adding a
stride parameter to Conv2D. With stride=2, the kernel moves two
pixels at a time instead of one, reducing the output size without
needing a separate pooling layer. Train a CNN that uses Conv2D with
stride=2 and no MaxPool2D. Compare the results.
Exercise 25.4. Implement a simple dropout layer that randomly
zeroes out activations during training (with probability \(p = 0.3\))
and scales the remaining activations by \(\frac{1}{1-p}\). During
evaluation, dropout should be a no-op. Insert it between the flatten
and dense layers of TinyCNN. Does it help on this toy task? (Hint:
dropout is most useful when the model is overfitting, which our small
CNN does not.)
Exercise 25.5. Run the capacity sweep from Section 25.2 but for the CNN instead: vary the number of convolutional filters from 1 to 8. How does the CNN’s accuracy change? Is the CNN more or less sensitive to this hyperparameter than the MLP is to its hidden width?