Chapter 23: Building a CNN from Scratch#
In Part V we built a fully-connected neural network from the ground up. Every input neuron was connected to every hidden neuron – a sensible choice for small, unstructured inputs. But images have spatial structure: nearby pixels are related, and the same edge or texture can appear anywhere in the field of view. A convolutional neural network (CNN) exploits this structure by replacing the dense matrix multiply with a local, sliding-window operation called convolution.
In this chapter we assemble all the building blocks of a small CNN:
Conv2D – the convolutional layer (defined in Chapter 22),
ReLU – the nonlinearity inserted after each convolution,
MaxPool2D – spatial downsampling that preserves the strongest activations,
Flatten and Dense – the bridge from spatial feature maps to class scores.
We then combine them into a complete TinyCNN class and generate a synthetic dataset of oriented line patterns to test it on.
Prerequisites
This chapter assumes familiarity with the Conv2D layer introduced in Chapter 22.
All code is pure NumPy – no deep learning frameworks are used.
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('seaborn-v0_8-whitegrid')
plt.rcParams.update({
'figure.facecolor': '#FAF8F0',
'axes.facecolor': '#FAF8F0',
'font.size': 11,
})
# Project colour palette
BLUE = '#3b82f6'
BLUE_DARK = '#2563eb'
GREEN = '#059669'
GREEN_LIGHT = '#10b981'
AMBER = '#d97706'
RED = '#dc2626'
BURGUNDY = '#8c2f39'
We begin by defining the Conv2D layer. In this chapter we implement only the
forward pass; the backward pass (needed for training) will be derived and
implemented in Chapter 24.
Definition (2D Convolution Layer)
A Conv2D layer with \(C_{\text{out}}\) filters of size \(k \times k\) applied to an input with \(C_{\text{in}}\) channels computes
for each filter \(f = 1, \ldots, C_{\text{out}}\) and each valid spatial position \((i, j)\). The output spatial dimensions are \(H_{\text{out}} = H - k + 1\) and \(W_{\text{out}} = W - k + 1\) (no padding, stride 1).
class Conv2D:
"""2D convolutional layer (forward pass only).
Parameters
----------
in_channels : int
Number of input channels.
out_channels : int
Number of filters (output channels).
kernel_size : int
Spatial size of each filter (kernel_size x kernel_size).
seed : int
Random seed for reproducibility.
"""
def __init__(self, in_channels, out_channels, kernel_size, seed=42):
rng = np.random.default_rng(seed)
fan_in = in_channels * kernel_size * kernel_size
scale = np.sqrt(2.0 / fan_in) # He initialization
self.in_channels = in_channels
self.out_channels = out_channels
self.kernel_size = kernel_size
self.weights = rng.normal(0.0, scale,
size=(out_channels, in_channels,
kernel_size, kernel_size))
self.bias = np.zeros(out_channels)
self.last_input = None # cached for backward (ch24)
def forward(self, x):
"""Slide each filter across the input and accumulate dot products.
Parameters
----------
x : ndarray, shape (batch, in_channels, height, width)
Returns
-------
output : ndarray, shape (batch, out_channels, out_h, out_w)
"""
self.last_input = x
batch_size, _, height, width = x.shape
out_h = height - self.kernel_size + 1
out_w = width - self.kernel_size + 1
output = np.zeros((batch_size, self.out_channels, out_h, out_w))
for row in range(out_h):
for col in range(out_w):
patch = x[:, :,
row:row + self.kernel_size,
col:col + self.kernel_size]
# tensordot over (in_channels, kH, kW) axes
output[:, :, row, col] = (
np.tensordot(patch, self.weights,
axes=([1, 2, 3], [1, 2, 3]))
+ self.bias
)
return output
@property
def parameter_count(self):
return int(self.weights.size + self.bias.size)
print("Conv2D class defined (forward only).")
print("Attributes: weights, bias, last_input")
print("Methods: forward, parameter_count")
Conv2D class defined (forward only).
Attributes: weights, bias, last_input
Methods: forward, parameter_count
23.1 ReLU After Convolution#
A convolution is a linear operation: it computes weighted sums over local patches. Stacking two linear operations without a nonlinearity in between collapses to a single linear operation – exactly the lesson of Chapter 8 (the XOR problem). To build depth that matters, we insert a rectified linear unit (ReLU) after every convolution:
Why ReLU?
ReLU is the default activation in modern CNNs for three reasons:
Sparse activation – roughly half the units output zero, yielding efficient representations.
No vanishing gradient – the gradient is either 0 or 1, so deep networks train easily.
Computational simplicity – a single comparison, much cheaper than sigmoid or tanh.
class ReLU:
"""Element-wise Rectified Linear Unit."""
def __init__(self):
self.last_input = None
def forward(self, x):
self.last_input = x
return np.maximum(0.0, x)
def backward(self, d_output):
return d_output * (self.last_input > 0.0)
print("ReLU class defined.")
print("forward: max(0, x)")
print("backward: pass gradient where x > 0, zero elsewhere")
ReLU class defined.
forward: max(0, x)
backward: pass gradient where x > 0, zero elsewhere
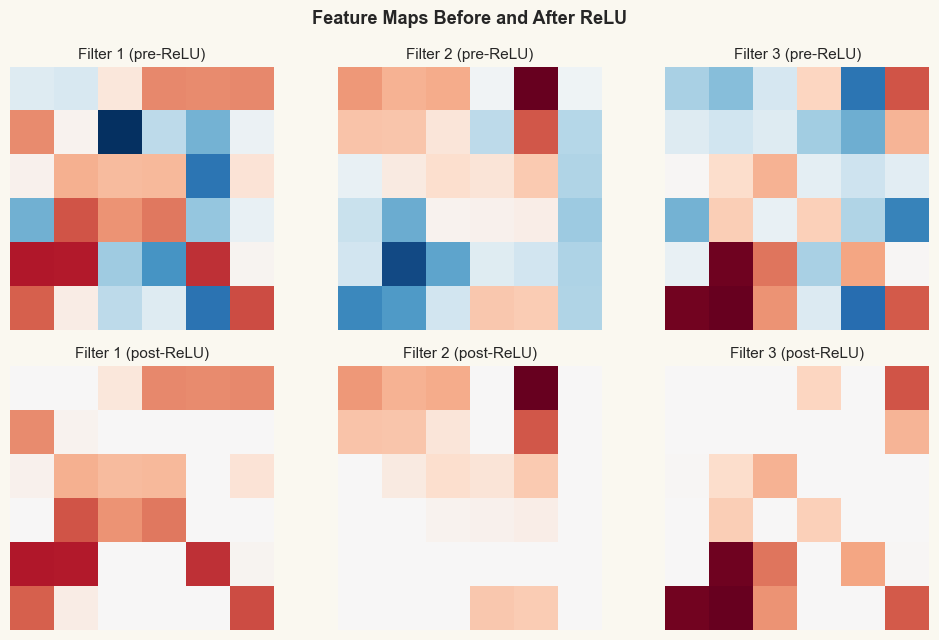
The figure below shows what happens to a feature map before and after ReLU. All negative activations are set to zero, producing a sparser representation.
Show code cell source
# Visualize pre- and post-ReLU feature maps
rng_demo = np.random.default_rng(0)
demo_input = rng_demo.normal(0, 1, size=(1, 1, 8, 8)) # single 8x8 image
conv_demo = Conv2D(in_channels=1, out_channels=3, kernel_size=3, seed=0)
relu_demo = ReLU()
pre_relu = conv_demo.forward(demo_input) # (1, 3, 6, 6)
post_relu = relu_demo.forward(pre_relu)
fig, axes = plt.subplots(2, 3, figsize=(10, 6.5))
for f in range(3):
vmin = pre_relu[0, f].min()
vmax = pre_relu[0, f].max()
vm = max(abs(vmin), abs(vmax))
axes[0, f].imshow(pre_relu[0, f], cmap='RdBu_r', vmin=-vm, vmax=vm)
axes[0, f].set_title(f'Filter {f+1} (pre-ReLU)', fontsize=11)
axes[0, f].axis('off')
axes[1, f].imshow(post_relu[0, f], cmap='RdBu_r', vmin=-vm, vmax=vm)
axes[1, f].set_title(f'Filter {f+1} (post-ReLU)', fontsize=11)
axes[1, f].axis('off')
fig.suptitle('Feature Maps Before and After ReLU', fontsize=13, fontweight='bold')
plt.tight_layout()
plt.show()
23.2 Max Pooling#
After the convolution + ReLU pair has extracted local features, we want to downsample the feature maps. This serves two purposes:
Reduce computation – fewer spatial positions means fewer operations in later layers.
Translation invariance – small shifts in the input do not change the pooled output.
Definition (Max Pooling)
Max pooling with pool size \(p\) partitions each channel of the feature map into non-overlapping \(p \times p\) windows and replaces each window with its maximum value:
The output spatial dimensions are \(H_{\text{out}} = \lfloor H/p \rfloor\) and \(W_{\text{out}} = \lfloor W/p \rfloor\).
Tip
Max pooling retains the strongest activation in each window, discarding precise spatial location. This is exactly the trade-off we want: “Is there an edge somewhere in this region?” rather than “Is there an edge at pixel \((3, 7)\)?”
class MaxPool2D:
"""Max pooling with non-overlapping windows.
Parameters
----------
pool_size : int
Side length of each pooling window.
"""
def __init__(self, pool_size=2):
self.pool_size = pool_size
self.last_input = None
self.last_mask = None # records winner positions for backward
def forward(self, x):
self.last_input = x
batch_size, channels, height, width = x.shape
out_h = height // self.pool_size
out_w = width // self.pool_size
output = np.zeros((batch_size, channels, out_h, out_w))
mask = np.zeros_like(x)
for row in range(out_h):
for col in range(out_w):
rs = row * self.pool_size
cs = col * self.pool_size
window = x[:, :, rs:rs + self.pool_size,
cs:cs + self.pool_size]
output[:, :, row, col] = window.max(axis=(2, 3))
flat_idx = window.reshape(
batch_size, channels, -1).argmax(axis=2)
for b in range(batch_size):
for c in range(channels):
winner = flat_idx[b, c]
wr = winner // self.pool_size
wc = winner % self.pool_size
mask[b, c, rs + wr, cs + wc] = 1.0
self.last_mask = mask
return output
def backward(self, d_output):
d_input = np.zeros_like(self.last_input)
out_h, out_w = d_output.shape[2], d_output.shape[3]
for row in range(out_h):
for col in range(out_w):
rs = row * self.pool_size
cs = col * self.pool_size
mask_w = self.last_mask[
:, :, rs:rs + self.pool_size,
cs:cs + self.pool_size]
d_input[:, :, rs:rs + self.pool_size,
cs:cs + self.pool_size] += (
mask_w * d_output[:, :, row, col][:, :, None, None]
)
return d_input
print("MaxPool2D class defined.")
print("forward: take the max in each pool_size x pool_size window")
print("backward: route gradient only to the max position")
MaxPool2D class defined.
forward: take the max in each pool_size x pool_size window
backward: route gradient only to the max position
Show code cell source
# Visualize max pooling on a 6x6 feature map -> 3x3
rng_pool = np.random.default_rng(42)
fmap = rng_pool.integers(0, 10, size=(1, 1, 6, 6)).astype(float)
pool_demo = MaxPool2D(pool_size=2)
pooled = pool_demo.forward(fmap)
fig, axes = plt.subplots(1, 2, figsize=(10, 4))
# Input 6x6
ax = axes[0]
im = ax.imshow(fmap[0, 0], cmap='Blues', vmin=0, vmax=10)
for i in range(6):
for j in range(6):
val = int(fmap[0, 0, i, j])
is_max = pool_demo.last_mask[0, 0, i, j] > 0
color = RED if is_max else 'black'
weight = 'bold' if is_max else 'normal'
ax.text(j, i, str(val), ha='center', va='center',
fontsize=13, color=color, fontweight=weight)
# Draw pool boundaries
for k in range(0, 7, 2):
ax.axhline(k - 0.5, color='gray', linewidth=2)
ax.axvline(k - 0.5, color='gray', linewidth=2)
ax.set_title('Input 6x6 (max positions in red)', fontsize=12)
ax.set_xticks([])
ax.set_yticks([])
# Output 3x3
ax = axes[1]
ax.imshow(pooled[0, 0], cmap='Blues', vmin=0, vmax=10)
for i in range(3):
for j in range(3):
ax.text(j, i, str(int(pooled[0, 0, i, j])),
ha='center', va='center', fontsize=15,
fontweight='bold', color=BLUE_DARK)
ax.set_title('Output 3x3 (after MaxPool 2x2)', fontsize=12)
ax.set_xticks([])
ax.set_yticks([])
fig.suptitle('Max Pooling: 6x6 -> 3x3 with pool_size=2',
fontsize=13, fontweight='bold')
plt.tight_layout()
plt.show()
print("Each 2x2 block is replaced by its maximum value.")
print("The spatial resolution is halved in each dimension.")
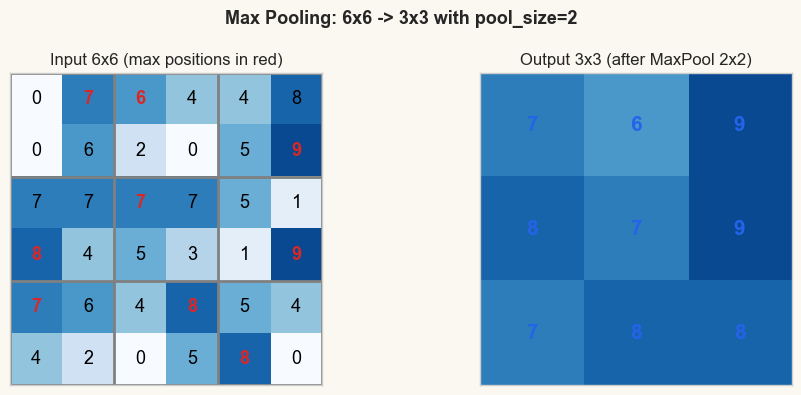
Each 2x2 block is replaced by its maximum value.
The spatial resolution is halved in each dimension.
23.3 Flatten and Dense#
After convolution, ReLU, and pooling, we have a 3-D tensor of shape
(batch, channels, height, width). To produce class scores we need a
fully-connected (dense) layer, which expects a 1-D vector per sample.
The Flatten layer reshapes the spatial feature maps into a flat vector:
The Dense layer then computes the familiar linear transformation:
where \(\bW \in \mathbb{R}^{D_{\text{in}} \times D_{\text{out}}}\) and \(\bb \in \mathbb{R}^{D_{\text{out}}}\).
class Flatten:
"""Reshape a 4-D tensor to 2-D (batch, features)."""
def __init__(self):
self.last_shape = None
def forward(self, x):
self.last_shape = x.shape
return x.reshape(x.shape[0], -1)
def backward(self, d_output):
return d_output.reshape(self.last_shape)
class Dense:
"""Fully-connected layer (forward pass only in this chapter).
Parameters
----------
in_features : int
Dimensionality of each input vector.
out_features : int
Number of output units.
seed : int
Random seed for reproducibility.
"""
def __init__(self, in_features, out_features, seed=42):
rng = np.random.default_rng(seed)
scale = np.sqrt(2.0 / in_features) # He initialization
self.weights = rng.normal(0.0, scale,
size=(in_features, out_features))
self.bias = np.zeros(out_features)
self.last_input = None
def forward(self, x):
self.last_input = x
return x @ self.weights + self.bias
@property
def parameter_count(self):
return int(self.weights.size + self.bias.size)
print("Flatten and Dense classes defined (forward only).")
print("Flatten: (B, C, H, W) -> (B, C*H*W)")
print("Dense: y = x @ W + b")
Flatten and Dense classes defined (forward only).
Flatten: (B, C, H, W) -> (B, C*H*W)
Dense: y = x @ W + b
We also need the softmax function and the cross-entropy loss for multi-class classification. These are identical to what we would use in a fully-connected network.
def softmax(logits):
"""Numerically stable softmax.
Parameters
----------
logits : ndarray, shape (batch, num_classes)
Returns
-------
probabilities : ndarray, same shape as logits
"""
shifted = logits - logits.max(axis=1, keepdims=True)
exp_values = np.exp(shifted)
return exp_values / exp_values.sum(axis=1, keepdims=True)
def softmax_cross_entropy(logits, targets):
"""Combined softmax + cross-entropy loss.
Parameters
----------
logits : ndarray, shape (batch, num_classes)
targets : ndarray of int, shape (batch,)
Returns
-------
loss : float
probabilities : ndarray, shape (batch, num_classes)
d_logits : ndarray, shape (batch, num_classes)
"""
probabilities = softmax(logits)
batch_idx = np.arange(targets.shape[0])
clipped = np.clip(probabilities[batch_idx, targets], 1e-12, 1.0)
loss = -np.log(clipped).mean()
d_logits = probabilities.copy()
d_logits[batch_idx, targets] -= 1.0
d_logits /= targets.shape[0]
return loss, probabilities, d_logits
print("softmax and softmax_cross_entropy defined.")
softmax and softmax_cross_entropy defined.
23.4 The TinyCNN Class#
We now assemble the pieces into a complete network. Our architecture is deliberately small so that it trains in seconds on the CPU:
Architecture Summary
TinyCNN has five layers:
Conv2D(1, 3, 3)– 3 filters of size \(3 \times 3\) on 1 input channelReLU– element-wise nonlinearityMaxPool2D(2)– \(2 \times 2\) max poolingFlatten– reshape \((3, 3, 3) \to (27)\)Dense(27, 3)– fully-connected layer producing 3 class scores
class TinyCNN:
"""A minimal convolutional neural network for 8x8 grayscale images.
Architecture:
Conv2D(1->3, 3x3) -> ReLU -> MaxPool(2x2) -> Flatten -> Dense(27->3)
"""
def __init__(self, seed=42):
self.conv = Conv2D(in_channels=1, out_channels=3,
kernel_size=3, seed=seed)
self.relu = ReLU()
self.pool = MaxPool2D(pool_size=2)
self.flatten = Flatten()
self.dense = Dense(in_features=27, out_features=3,
seed=seed + 1)
self.layers = [self.conv, self.relu, self.pool,
self.flatten, self.dense]
def forward(self, x):
"""Forward pass through all layers."""
for layer in self.layers:
x = layer.forward(x)
return x # logits, shape (batch, 3)
def predict(self, x):
"""Return predicted class indices."""
logits = self.forward(x)
return np.argmax(logits, axis=1)
def evaluate(self, x, y):
"""Compute accuracy on a dataset."""
preds = self.predict(x)
return np.mean(preds == y)
print("TinyCNN class defined.")
print("Architecture: Conv2D(1->3, 3x3) -> ReLU -> MaxPool(2) -> Flatten -> Dense(27->3)")
print("Methods: forward, predict, evaluate")
TinyCNN class defined.
Architecture: Conv2D(1->3, 3x3) -> ReLU -> MaxPool(2) -> Flatten -> Dense(27->3)
Methods: forward, predict, evaluate
23.5 Layer Summary#
Let us verify the shapes and count the parameters at each stage.
Show code cell source
# Layer summary table
model = TinyCNN(seed=42)
# Run a dummy forward pass to capture shapes
dummy = np.zeros((1, 1, 8, 8))
shapes = [('Input', dummy.shape)]
x = dummy
for layer in model.layers:
x = layer.forward(x)
shapes.append((type(layer).__name__, x.shape))
print(f'{"Layer":<12} {"Output Shape":<22} {"Parameters":>10}')
print('=' * 46)
total_params = 0
for name, shape in shapes:
if name == 'Conv2D':
p = model.conv.parameter_count
elif name == 'Dense':
p = model.dense.parameter_count
else:
p = 0
total_params += p
shape_str = str(shape)
p_str = str(p) if p > 0 else '-'
print(f'{name:<12} {shape_str:<22} {p_str:>10}')
print('=' * 46)
print(f'{"TOTAL":<12} {"":<22} {total_params:>10}')
print(f'\nConv2D: 3 filters x (1 x 3 x 3) + 3 biases = {model.conv.parameter_count}')
print(f'Dense: 27 x 3 weights + 3 biases = {model.dense.parameter_count}')
print(f'Total trainable parameters: {total_params}')
Layer Output Shape Parameters
==============================================
Input (1, 1, 8, 8) -
Conv2D (1, 3, 6, 6) 30
ReLU (1, 3, 6, 6) -
MaxPool2D (1, 3, 3, 3) -
Flatten (1, 27) -
Dense (1, 3) 84
==============================================
TOTAL 114
Conv2D: 3 filters x (1 x 3 x 3) + 3 biases = 30
Dense: 27 x 3 weights + 3 biases = 84
Total trainable parameters: 114
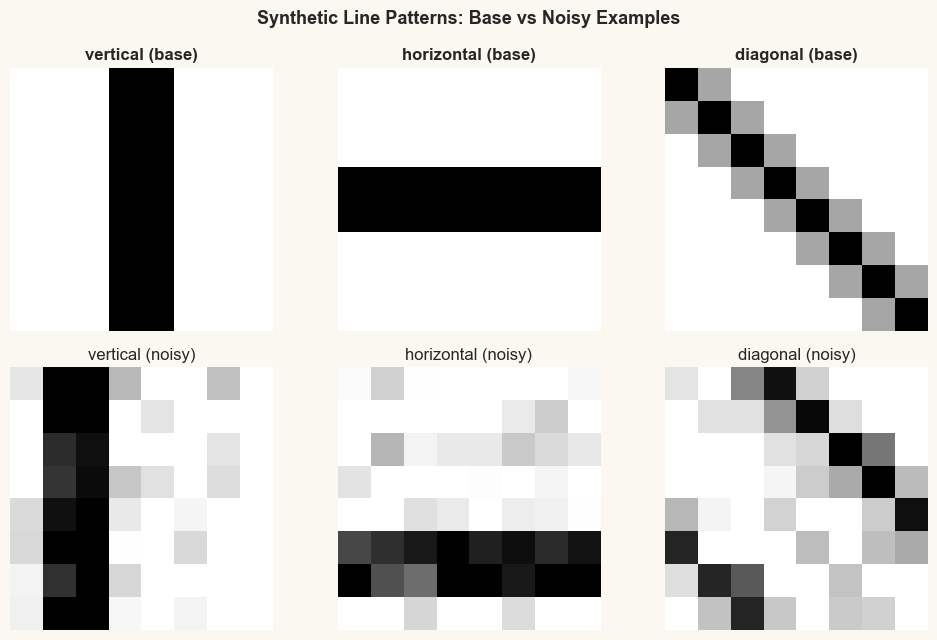
23.6 The Synthetic Dataset#
To test our TinyCNN we create a simple dataset of \(8 \times 8\) grayscale images containing three classes of oriented line patterns:
vertical – a vertical bar through the center,
horizontal – a horizontal bar through the center,
diagonal – a diagonal line from top-left to bottom-right.
Each training example is generated by taking the base pattern, applying random vertical/horizontal shifts, and adding Gaussian noise. This mimics the kind of translation variability that makes CNNs superior to fully-connected networks.
Why Synthetic Data?
Using synthetic data lets us control exactly what the network must learn. We know the ground truth – three oriented patterns – so we can later inspect whether the learned filters match these orientations.
CLASS_NAMES = ("vertical", "horizontal", "diagonal")
def _pattern_for_class(class_name, size):
"""Generate the base pattern for a given class."""
pattern = np.zeros((size, size))
center = size // 2
if class_name == "vertical":
pattern[:, center - 1:center + 1] = 1.0
elif class_name == "horizontal":
pattern[center - 1:center + 1, :] = 1.0
elif class_name == "diagonal":
np.fill_diagonal(pattern, 1.0)
pattern += 0.35 * np.eye(size, k=1)
pattern += 0.35 * np.eye(size, k=-1)
return np.clip(pattern, 0.0, 1.0)
def make_dataset_bundle(train_per_class=60, val_per_class=30,
size=8, seed=7, class_names=CLASS_NAMES):
"""Generate shifted, noisy variants of base patterns.
Returns
-------
x_train : ndarray, shape (N_train, 1, size, size)
y_train : ndarray of int, shape (N_train,)
x_val : ndarray, shape (N_val, 1, size, size)
y_val : ndarray of int, shape (N_val,)
class_names : tuple of str
"""
rng = np.random.default_rng(seed)
all_x, all_y = [], []
total_per_class = train_per_class + val_per_class
for cls_idx, cls_name in enumerate(class_names):
base = _pattern_for_class(cls_name, size)
for _ in range(total_per_class):
# Random shift
shift_r = rng.integers(-2, 3)
shift_c = rng.integers(-2, 3)
shifted = np.roll(np.roll(base, shift_r, axis=0),
shift_c, axis=1)
# Add noise
noisy = shifted + rng.normal(0, 0.15, size=(size, size))
noisy = np.clip(noisy, 0.0, 1.0)
all_x.append(noisy)
all_y.append(cls_idx)
all_x = np.array(all_x)[:, None, :, :] # (N, 1, 8, 8)
all_y = np.array(all_y, dtype=int)
# Shuffle and split
perm = rng.permutation(len(all_y))
all_x, all_y = all_x[perm], all_y[perm]
n_train = train_per_class * len(class_names)
x_train, y_train = all_x[:n_train], all_y[:n_train]
x_val, y_val = all_x[n_train:], all_y[n_train:]
return x_train, y_train, x_val, y_val, class_names
# Generate the dataset
x_train, y_train, x_val, y_val, class_names = make_dataset_bundle()
print(f"Training set: {x_train.shape[0]} images, shape {x_train.shape[1:]}")
print(f"Validation set: {x_val.shape[0]} images, shape {x_val.shape[1:]}")
print(f"Classes: {class_names}")
for i, name in enumerate(class_names):
n_tr = (y_train == i).sum()
n_va = (y_val == i).sum()
print(f" {name}: {n_tr} train, {n_va} val")
Training set: 180 images, shape (1, 8, 8)
Validation set: 90 images, shape (1, 8, 8)
Classes: ('vertical', 'horizontal', 'diagonal')
vertical: 67 train, 23 val
horizontal: 54 train, 36 val
diagonal: 59 train, 31 val
Show code cell source
# Gallery of example patterns (2 rows x 3 cols)
fig, axes = plt.subplots(2, 3, figsize=(10, 6.5))
for cls_idx in range(3):
# Show base pattern
base = _pattern_for_class(class_names[cls_idx], 8)
axes[0, cls_idx].imshow(base, cmap='gray_r', vmin=0, vmax=1)
axes[0, cls_idx].set_title(f'{class_names[cls_idx]} (base)',
fontsize=12, fontweight='bold')
axes[0, cls_idx].axis('off')
# Show a noisy/shifted example
idx = np.where(y_train == cls_idx)[0][0]
axes[1, cls_idx].imshow(x_train[idx, 0], cmap='gray_r',
vmin=0, vmax=1)
axes[1, cls_idx].set_title(f'{class_names[cls_idx]} (noisy)',
fontsize=12)
axes[1, cls_idx].axis('off')
fig.suptitle('Synthetic Line Patterns: Base vs Noisy Examples',
fontsize=13, fontweight='bold')
plt.tight_layout()
plt.show()
Let us verify that the untrained TinyCNN produces essentially random predictions:
Show code cell source
model_untrained = TinyCNN(seed=42)
acc_train = model_untrained.evaluate(x_train, y_train)
acc_val = model_untrained.evaluate(x_val, y_val)
print(f"Untrained TinyCNN accuracy:")
print(f" Train: {acc_train:.1%} (chance = {1/3:.1%})")
print(f" Val: {acc_val:.1%}")
print("\nThe network needs training! That is the subject of Chapter 24.")
Untrained TinyCNN accuracy:
Train: 38.3% (chance = 33.3%)
Val: 40.0%
The network needs training! That is the subject of Chapter 24.
Exercises#
Exercise 23.1. Compute the output shape of a Conv2D layer with in_channels=3,
out_channels=8, kernel_size=5 applied to an input of shape (16, 3, 32, 32).
How many parameters does this layer have?
Exercise 23.2. What happens if we remove the ReLU between convolution and pooling? Explain why the network’s representational power would be affected, connecting your answer to the XOR impossibility result of Chapter 8.
Exercise 23.3. Average pooling replaces each window with its mean instead of its
maximum. Implement an AvgPool2D class with forward and backward methods.
What is the backward pass of average pooling?
Exercise 23.4. Add a fourth class "dot" (a 2x2 square in the center) to the
dataset. What changes are needed in the TinyCNN architecture? Modify the code
and verify that the shapes are consistent.
Exercise 23.5. Our TinyCNN has about 114 parameters. A fully-connected network mapping 64 inputs to 3 outputs through a hidden layer of 27 neurons would have \(64 \times 27 + 27 + 27 \times 3 + 3 = 1839\) parameters. Explain the source of this large difference and discuss the concept of parameter sharing in CNNs.